This is the 26th post in a series of Nikon D850 tests. The series starts here.
I’ve just purchased a bunch of Sigma lenses, thanks to the D850. Why’s that? It’s a somewhat-complicated chain of reasoning:
- Because the D850’s Focus Shift Shooting (FSS) feature as the potential to completely change the way I work with static subjects when sharpness is paramount.
- Although FSS looks like it’s designed for focus stacking, I intend to use it for focus bracketing as well.
- I had pretty much standardized on Zeiss lenses for use with F-mount cameras and static subjects.
- Those were all manual focus lenses.
- FSS works only with autofocus lenses.
- I’ve been really happy with the two Sigma ART lenses that I have, the 50/1.4 and the 24/1.4.
- With some notable exceptions like the 105/1.4 and the 70-200/2.8, I have not been as happy with recent Nikon lenses.
So I’m going to be testing several Sigma lenses on the D850. First up is the 135 mm f/1.8 ART.
I tested the lens for on-axis sharpness with a backlit razor-blade target at 1.5 meters. I used the D850’s Focus Shift Shooting feature for focus bracketing, and made exposures at the whole stops from f/2.8 through f/11, and wide open. Here’s the target I used:

Here’s the rest of the test protocol:
- ISO 64
- Focus shift, silent shutter option
- 40 steps
- Minimum step size (1)
- Aperture exposure mode
- Wescott LED panels set to 5500 K.
- Gitzo legs
- Arca Swiss C1 head
- Vinyl tile flooring over 6 inches on concrete on grade
I used Fast Raw Viewer to discard the really out of focus images and put the rest through my processing pipeline: dcraw in document mode, MTF Mapper, Matlab, and Excel.
Here are the results wide open:
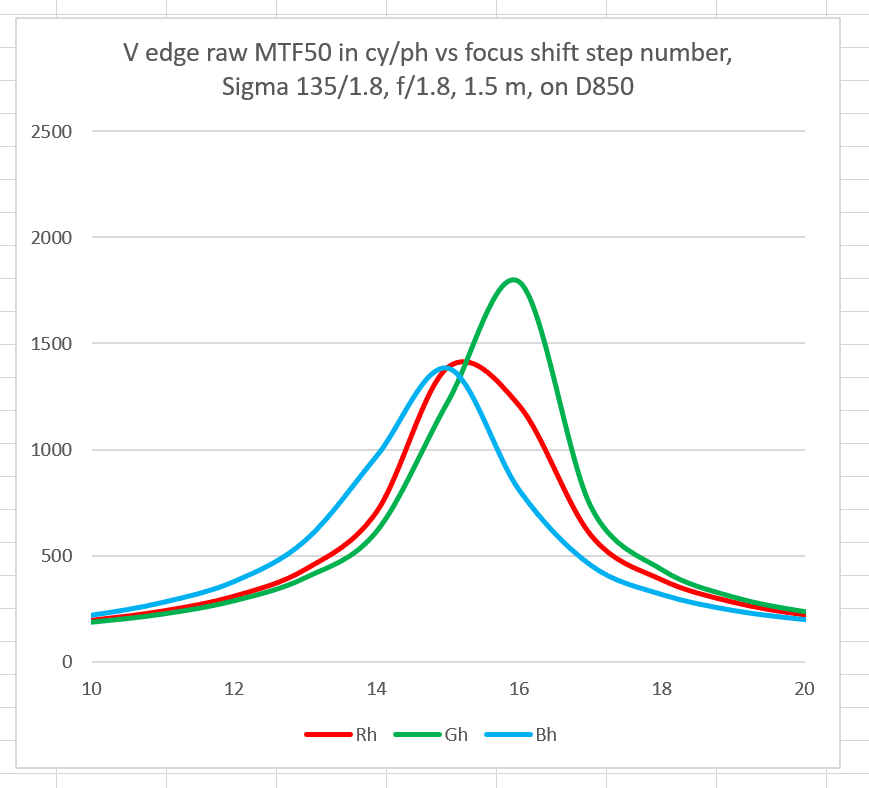
The vertical axis is MTF50, measured in cycles per picture height (cy/ph). The shot taken with the lens focused to the closest position is on the left. There are 7 more exposures plotted. There is no way to know the focused distance for these exposures. I used the minimum step size for the Focus Shift Shooting feature, which is too large to reliably catch the actual peaks, but it’s not that bad. It is clear that this is a seriously sharp lens wide open, although not in Otus territory, or even Zeiss 135/2 Apo-Sonnar territory. The green channel is by far the sharpest, which is the way you’d want it if two channels had to be down from the other. There is some longitudinal chromatic aberration (LoCA); the sharpest peak for the green channel comes one step away from the sharpest peak for the other two.
Stopping down to f/2.8:
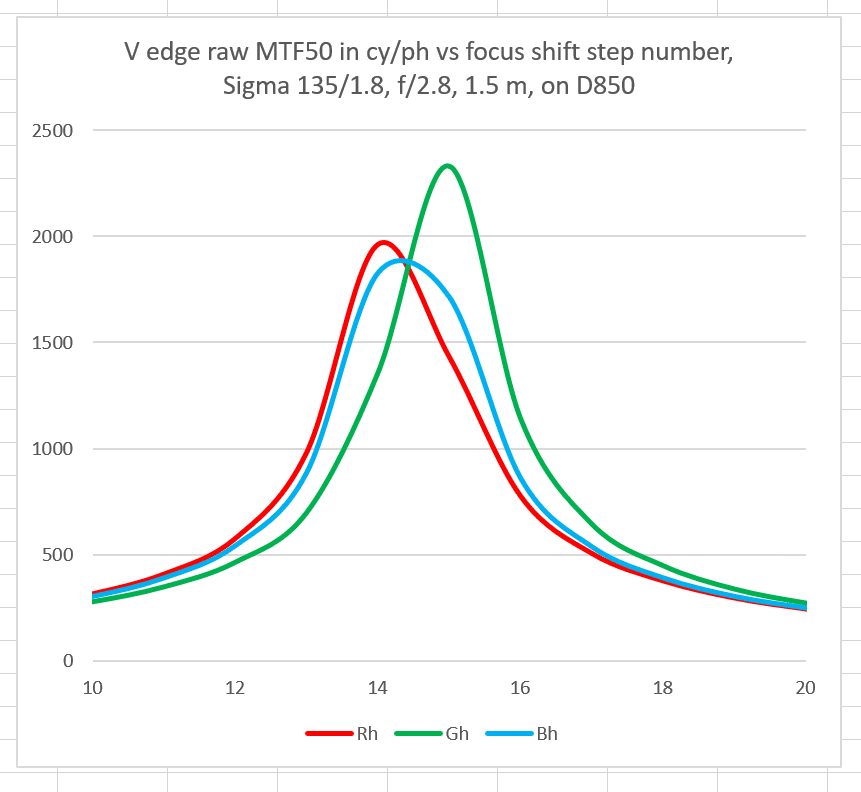
Now the sharpness has moved into Otus territory. The LoCA is still about one step. Note that the FSS steps get bigger as you stop down the lens.
At f/4:
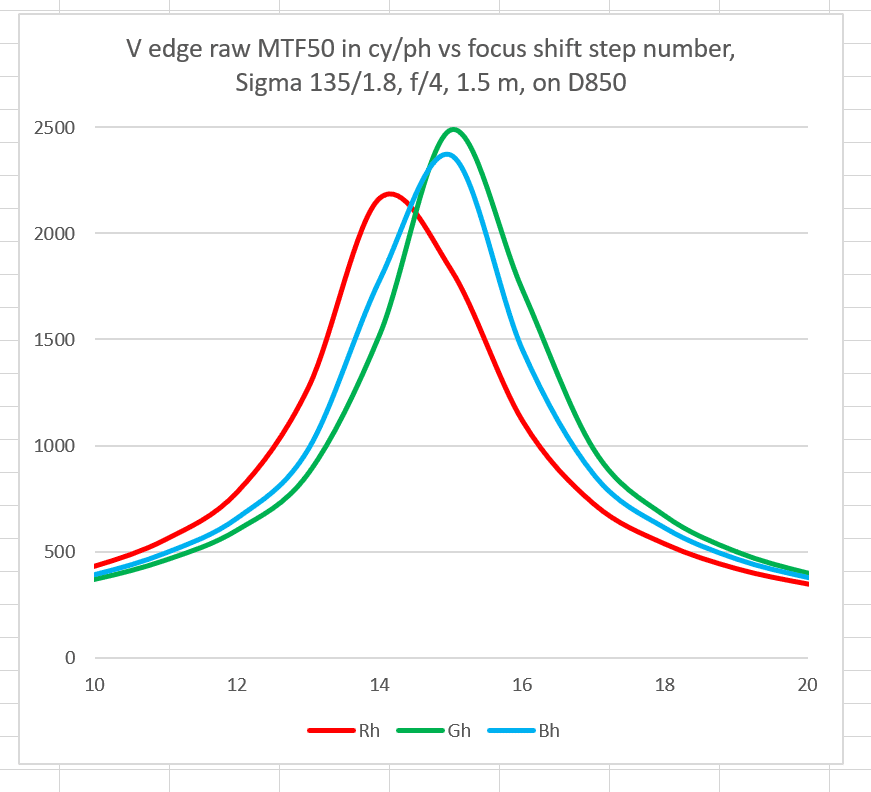
This is pretty spectacular. The blue and green channel MTF50 peaks are almost at the Nyquist frequency for the D850! The blue and green peaks line up now.
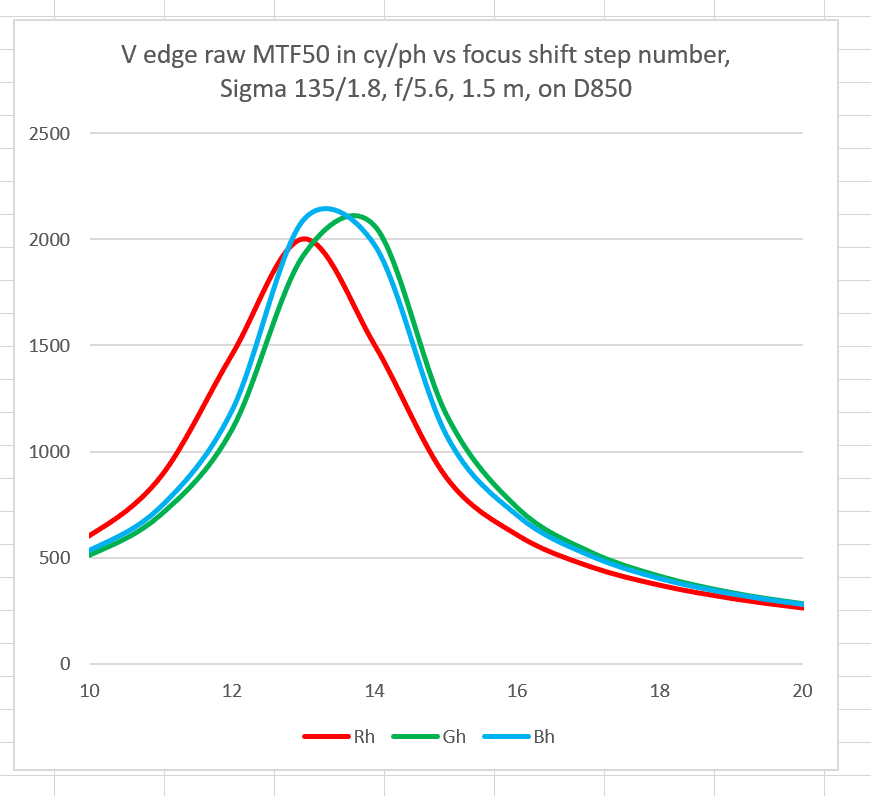
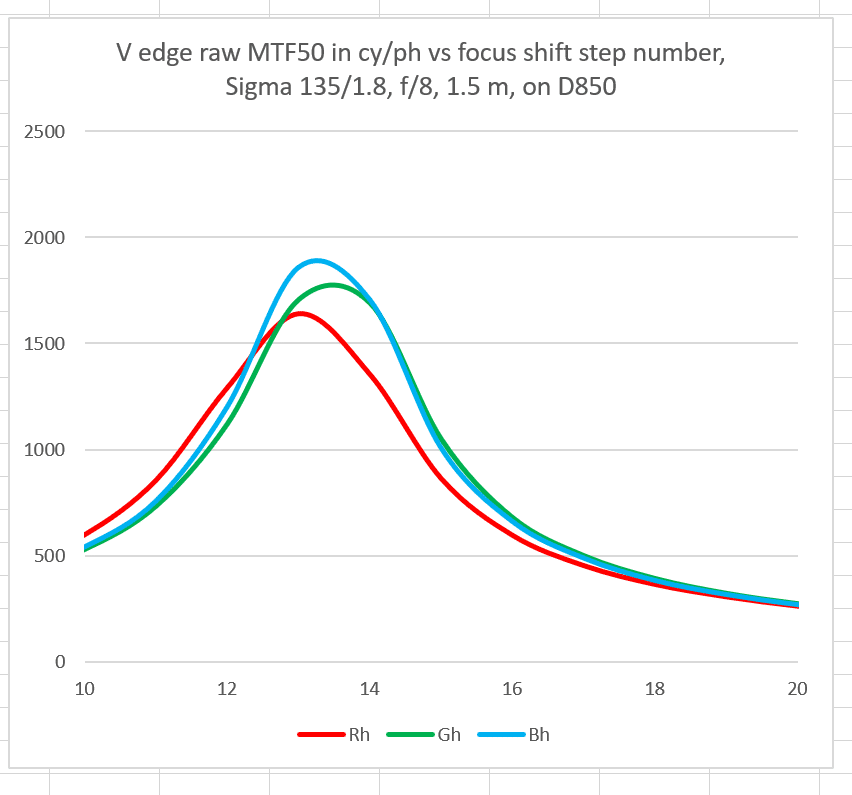
At f/5.6, the depth of field (DOF) has gotten to the point where it will cover up most of the LoCA. Sharpness has fallen, but the lens is still quite sharp.
Now diffraction is the limiting factor, and there is plenty of DOF to mask the LoCA.
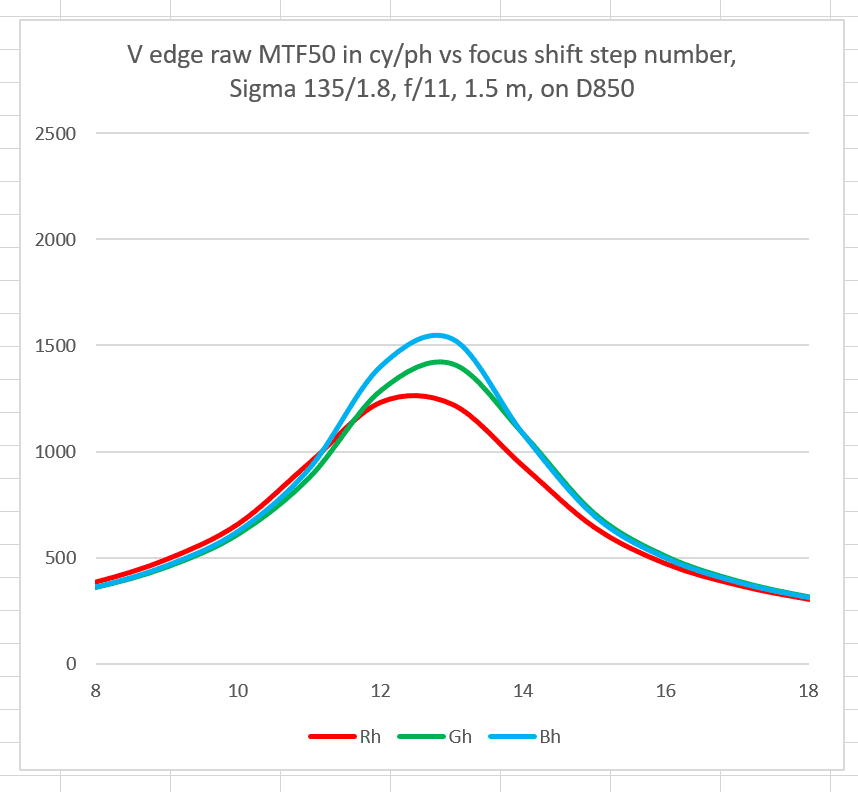
By f/11, most lenses tend to look about the same in this test. The Sigma 135/1.8 is no exception.
So, far, I’m impressed.
JK >> Because the D850’s Focus Shift Shooting (FSS) feature as the potential to completely change the way I work with static subjects when sharpness is paramount.
This Canon semi-defector to Sony wonders if Nikon’s FSS is related to Micro-Focus-Adjustment to fine-tune AF. Are the steps smaller with MFA than FSS?
Does Nikon call this feature “Autofocus Microadjustment”?
I don’t remember what Nikon calls the PDAF adjustment feature. It appears that the step sizes in that feature are smaller than the the steps in the FSS feature. I doubt if the two are related, but only the folks who wrote the firmware and their confidants know for sure.
1.5 m distance to subject may be zeroing in on an anomaly?
Marianne on DPR reported that LoCa is problematic only at ‘close’ shooting distance; and disappears at longer shooting distance.
I am far from a technical wizard, so my comment may be disregarded on that basis, but that part of the test triggered a memory of her comment.
And the issue may be irrelevant to the purpose of your test. (which appears to be an investigation if FFS can be a tool for determining optimal focus?)
Or is this ‘problem distance’ chosen purposefully as a problem and a possible solution?
Cheers, and thank you for being one of the people who pursue the technology limits so the benefits can filter down to the rest of us.
I’ve certainly seen LoCA at long subject distances. But I respect Marianne. Can you give me a link to her post that you’re talking about?
https://www.dpreview.com/forums/post/60363713
is a specific.
https://www.dpreview.com/forums/post/59556288;
finally found it, and no reply necessary, I’m not trying to argue with you, btw, just thought I’ld throw it in since you sparked a flashback, that may or may not be relevant.
Sorry for any annoyance.
Ah, I see. Marianne was referring to just the 135/1.8, and not LoCA vs distance in general. She might be right. I have a way to test for LoCA at long distance. It’s not quantitative though. I’ll give it a try when I get a chance. I am busy with the a7RIII right now, though.
I have read your detailed review a number of times. Comparing the Nikon 105mm f/1.4e and the Sigma 135mm f/1.8 DG, on my Nikon D850, which would show better focus, less focus shift?
Thank you!
The Sigma has less focus shift.