As we saw here, modeling the M240 as a normal camera with a slight negative offset helped explain the off noise floor characteristics, but didn’t provide a close match to the way the actual camera performs.
It turns out that negative offsets can model the dark tone errors quite well. Here’s what the green channel of the M240 looks like:
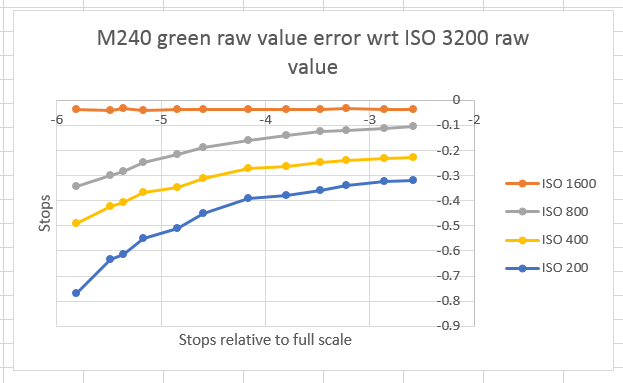
If you model the camera as having a Gaussian sensor noise floor with a standard deviation of 5.92 electrons and a pre-ADC offset of -4 LSBs (the same values that provided the closest match to the actual camera’s noise floor), and add some gain error as the ISO setting on the camera is changed, you get this:
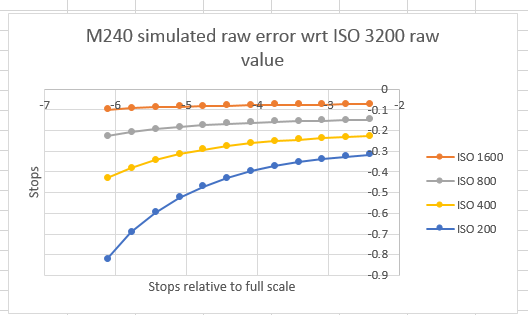
Pretty close!
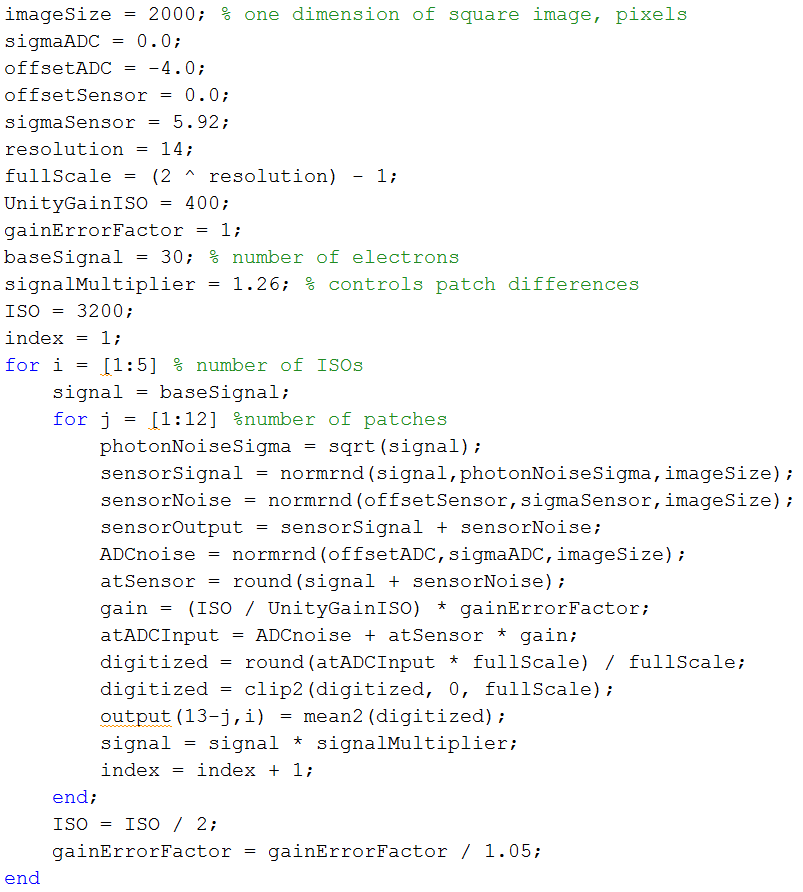
Here’s the simulation, in case anyone wants to check my work:
The mere fact that a model predicts actual behavior doesn’t mean that the real thing works the way the model says it does, but it indicates that’s a possibility.
Leave a Reply